Pipeline
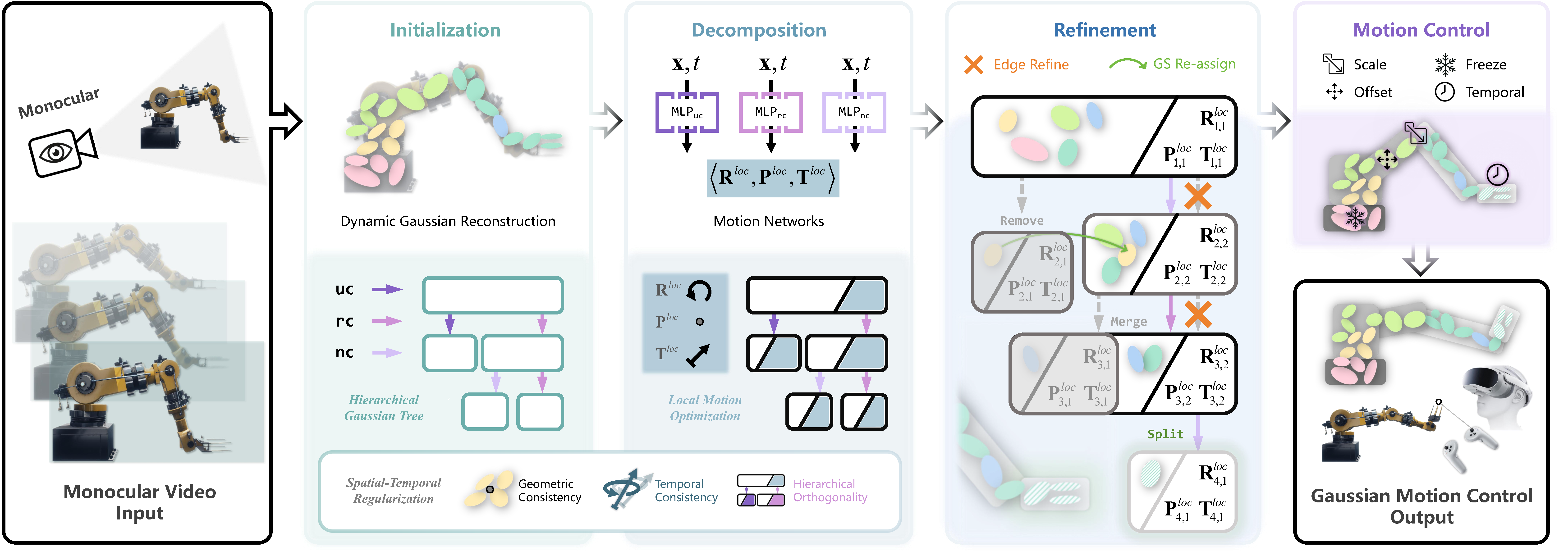
The pipeline of our motion hierarchical Gaussian based dynamic control method.
Intuitive motion control is essential for virtual reality, allowing users to manipulate objects naturally while receiving realistic and responsive visual feedback. 3D Gaussian splatting provides real-time, photorealistic scene rendering, making it promising for virtual reality applications. Still, it falls short in accurate motion control of dynamic objects due to its unstructured global motion representation and redundant motion learning. To address these problems, we propose a motion hierarchical Gaussian based dynamic control method. First, a motion hierarchical Gaussian representation is introduced and initialized with semantic and deformation information. Then a motion hierarchical decomposition method is proposed to optimize the local motion in the representation. The representation is next optimized by a local motion analysis based refinement method. We also design a set of motion control operations for the motion hierarchical Gaussian. Experimental results show that our method achieves high-precision motion reconstruction, accurate motion decomposition, real-time, intuitively and immersive VR motion control.
The pipeline of our motion hierarchical Gaussian based dynamic control method.
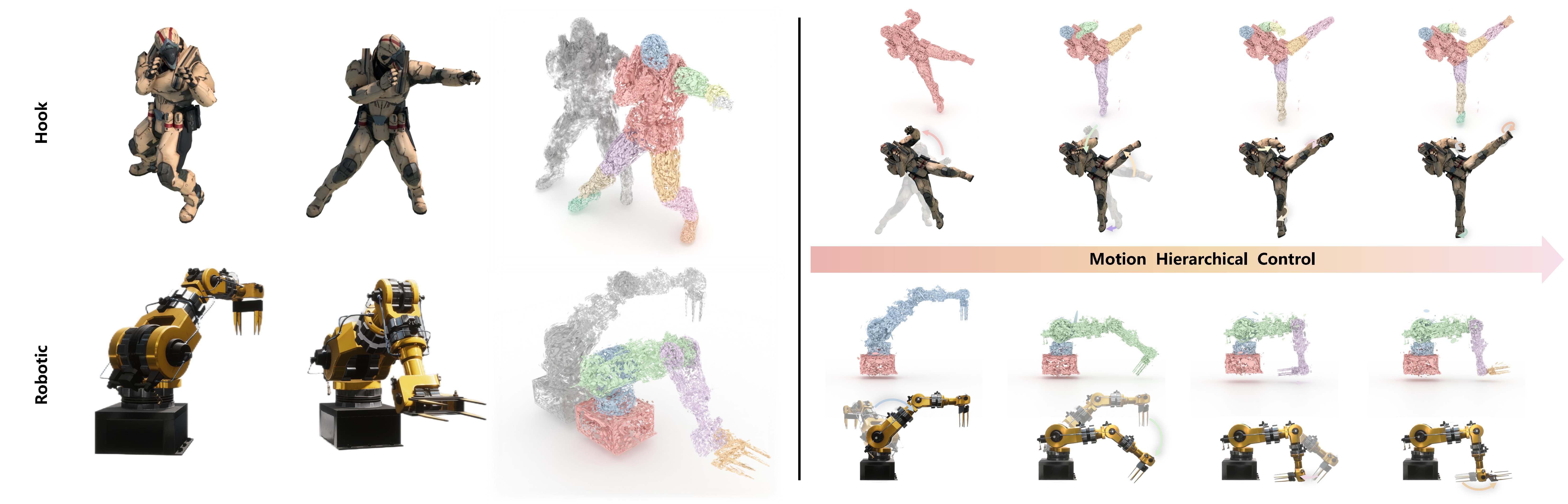
Motion reconstruction and control results for Robotic and Hook.
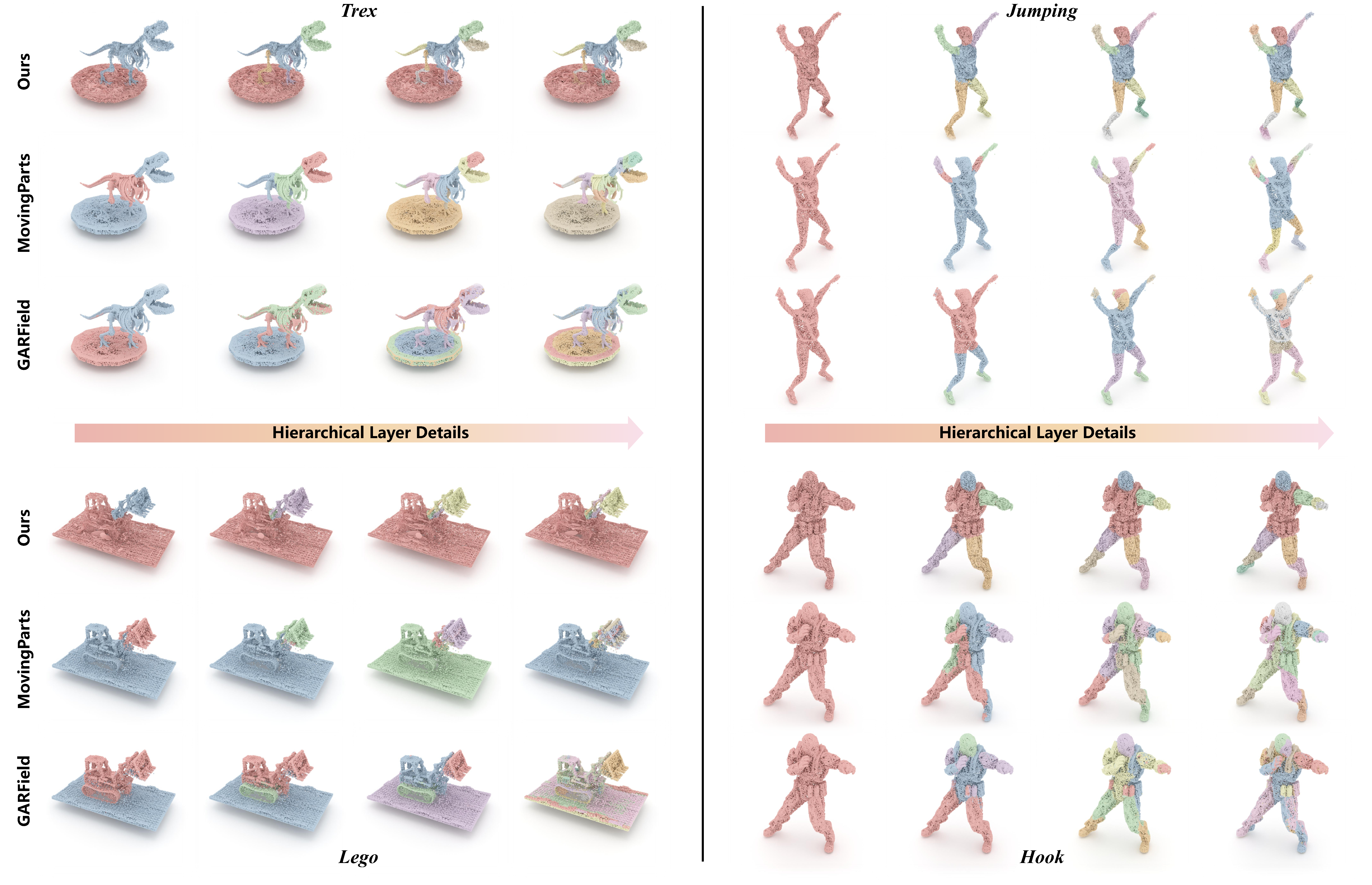
Visual comparison of hierarchical Gaussian decomposition between our method, GARField and MovingPart.

Visual comparison between ground-truth,the SOTA methods and our method on Jumping, Hook, Lego, Chicken, Robotic.